Current Research
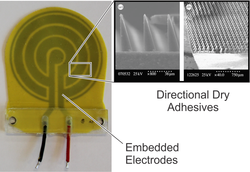
Electrostatic Gecko-Like Adhesives for Climbing, Perching, and Manipulation
Funded by the Office of Naval Research and NASA's Early Stage Innovations 
XPRIZE Rainforest Competition
IIT's Robotics Lab leads the "Welcome to the Jungle" team. The team is one of six finalists in the $10 million compeition. 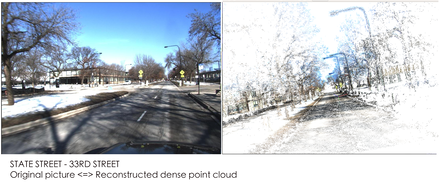
The Urban Design and Policy Implications of Ubiquitous Robots and Navigation Safety
Funded by the National Science Foundation National Robotics Initiative (NRI 2.0) |
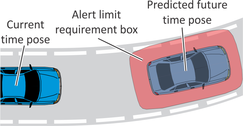
Navigation Integrity for Self Driving Cars and Other Mobile Robots
Funded by National Science Foundation National Robotics Initiative (NRI) 
Design Principles for Soft Robots Based on Boundary Constrained Granular Swarms
Funded by the National Science Foundation Emerging Frontiers in Research and Innovation (EFRI) Continuum, Compliant, and Configurable Soft Robotics Engineering (C3 SoRo) |
Previous Research

Multi-modal Locomotion
Funded by the Office of Naval Research and Commonwealth Edison 
|

|